The previous exercise involved navigating to 5 points at the Priory using a map and compass. This week's exercise challenged each team to complete the entire course of 15 points with two added elements: a GPS unit and paintball rifles. ArcPad enabled GPS units were used to deploy the navigation map and course points created in ArcMap. Aside from the designated starting point for each team, the points could be visited in any order as long as the no shooting zones next to buildings were avoided.
Methods
For this exercise, each team was given a different starting point in order to avoid firefights close to the no shooting zones. With our starting point located in the woods to the northwest of the priory campus, we decided to work our way through the points in a clockwise direction.
 |
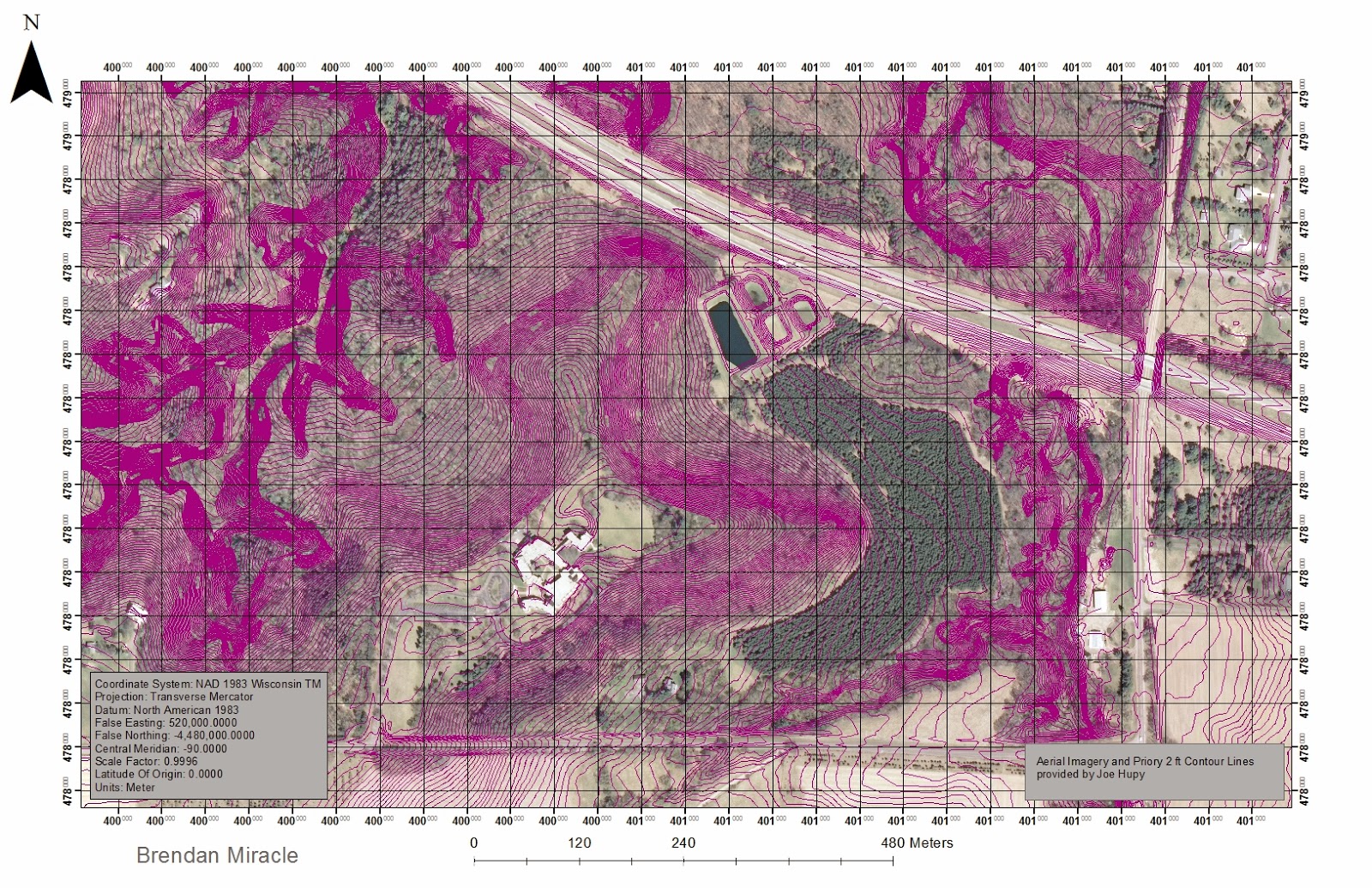
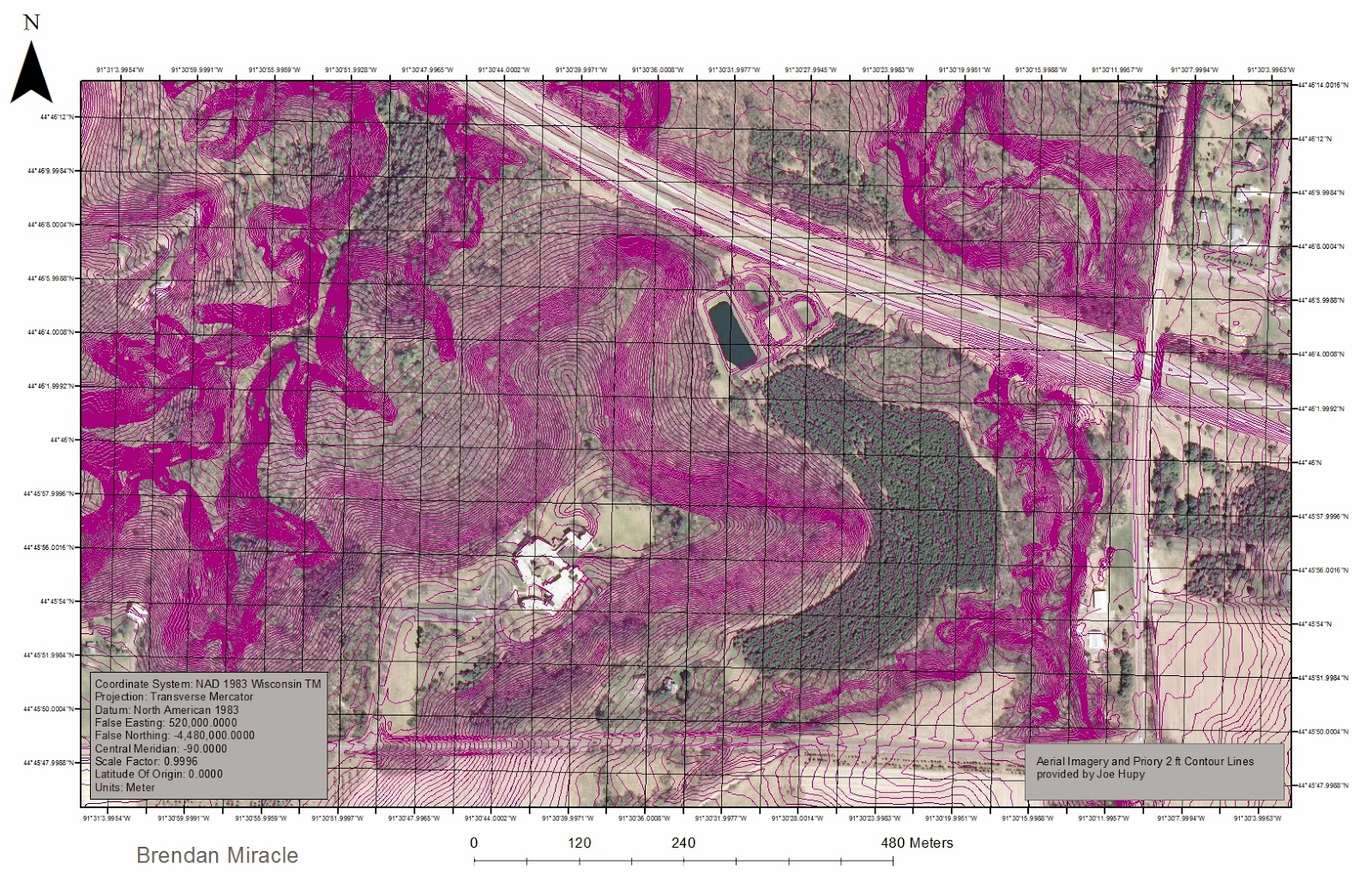
| Figure 1. The navigation map that was created in ArcMap and deployed onto the ArcPad enabled Juno GPS unit.
Using ArcMap, the map document was deployed onto the Juno unit by using the ArcPad Manager toolset. The map document was exported in a file type that was compatible with the unit and was placed on the SD card within the unit.
|
 |
| Figure 2. The navigation map after it was deployed onto the Juno 3B unit. The large cluttered labels made it difficult to see our location which made navigation a difficult task. |
Results
Although pictures would have been great for this blog post, carrying a camera or smartphone was not considered a priority while engaging in firefights and dodging incoming fire. Due to the cluttered labels on the map and the spotty signals from within the forest, the GPS was essentially useless for navigation. The location marker on the unit was always changing directions and locations which made it extremely difficult to narrow down our current location let alone travel to the next point. It was at this point that we decided to solely rely on the map we printed, as the terrain on the map was recognizable from the ground for the most part. Somehow, we made it to 12 of the 15 points and encountered a few enemy teams along the way. We quickly realized that we were fighting the same group multiple times due to their similar route, and we decided upon a truce for the remainder of the exercise.
When we attempted to zoom in and zoom out with the map, the ArcPad application would occasionally freeze and we would have to reset the whole unit. Each time we reset the unit, we noticed that the calibration decreased and decreased until the touch screen recognized the touch more than an inch away from the pen. Due to this problem, we were unable to plot any points at each of the flags let alone navigate using the GPS. A tracklog was also turned on before each group set off and unfortunately the data didn't record for any of the 6 groups.
Discussion
Due to the many problems we encountered with the map document, the GPS signal, and the GPS touch screen, it is hard to say what could have been improved. Some factors were within our control while others were unsolvable and unforeseeable. The paintball factor added in a lot of stress when deciding routes, and it obviously made an impact on the team's decision making and morale.